Local co-op adventure videogame.
Play as two mages trying to regain their power in a humorous fantasy setting.
Made by Curious Imp with a team of 17 people.
Pathogenesis is a 2D platform-based puzzle game where you control a vulnerable virus striving to survive in a microscopic world.

This personal project allowed me to explore creating an interactive narrative experience.
Through the game, I sought to convey the complex emotions of grief, offering players an immersive and emotional journey.
Notes and encounters designed for the TTRPGs I’ve runned as a DM

Matryoshka! is a charming puzzle game where you navigate the stages of life through the lens of a matryoshka doll.
The theme for the game jam was “Built to scale”, so we choose the ultimate built to scale toy.
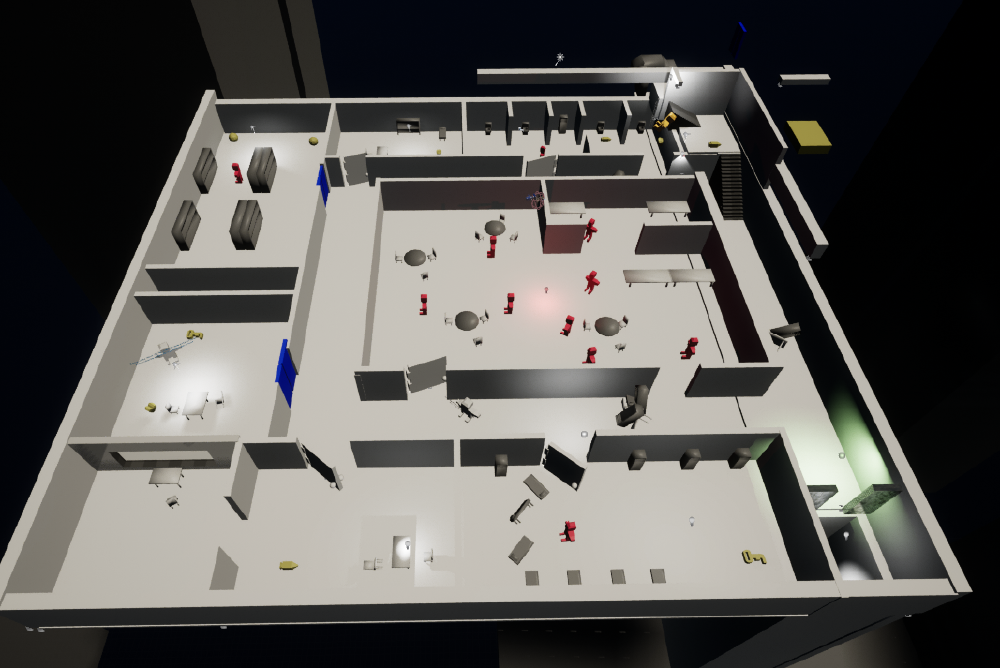
This project focuses on level blocking for a first-person horror game.
I aimed to explore how to create tension and suspense through level design, all while working with limited resources.

A research project in which I implemented an autonomous flight drone controller based on computer vision. I also developed the API and created the simulation environment for the controller.

An analysis of some of the most significant puzzles I’ve designed and implemented. I walk through the process and design choices I made during their development.
Videogame made for the GGJ 2024.
Not very sure what our purpose was here, but we had tons of fun making it.
I’m a Game Designer with a background in Software Engineering. I’m passionate about crafting immersive games and designing meaningful player experiences.
My technical expertise, combined with my creative vision, gives me a versatile skill set that allows me to contribute across all aspects of game development.


Sept 2024 - Present
Madrid, Spain
The studio is currently working on releasing the game Aard & Wyzz, with its demo available on Steam.
Generalist designer with a special emphasis on Technical Design, Camera-Control-Character, and Level Design. I hold the position of Lead Designer, where I coordinate the design team and communicate with other departments.
Sept 2024 - Present

Ene 2018 - Jul 2023
Madrid, Spain - Berlin, Germany
Expleo is a global engineering, technology and consulting service provider. I worked as a software engineer for the design and development of critical software for commercial and industrial railway systems.
My tasks included implementing systems in C++, Java, and Python, requirements analysis, project documentation, communication with other departments, and defining the testing protocol.
I worked on three projects, contributing at different stages of the project life cycles, and collaborating with teams from different countries.
Apr 2021 - Jul 2023
Apr 2021 - May 2020
Ene 2018 - Jun 2020
2015 - 2017
Madrid, Spain
JdeRobot is an open toolkit for developing Robotics applications made by the URJC’s Robotics Group’.
I worked on JdeRobot as a collaborator while I developed my thesis, creating new features while maintaining and upgrading different aspects of the project.
2015 - 2017
 Universidad Complutense de Madrid2024 Masters Degree in Videogame DesignPublications: | ||
 Universidad Rey Juan Carlos2017 Telecomunications Engineering DegreePublications: | ||
Aard and Wyzz: The rise of minions is a local cooperative action-adventure video game where two players will take on the role of the boss Ardwiz, a tyrant wizard recently divided in two after the unexpected rebellion of his minions, with a lot of extra hours in his body. These two mages will have to work together, using their magical abilities and strength, as well as merging at certain times to enhance their skills and defeat the senior staff of the office.
This paper addresses the design and implementation of a path following controlling system for a drone which relies on 3D localization by visual markers. It has been designed only for indoor flights. Special attention is paid to accuracy of the position estimation algorithm, robustness of the path following controller and real time operation. The path following system is composed of two components, one responsible of the image analysis and 3D pose estimation and another responsible of the drone navigation. It has been experimentally validated both in Gazebo simulator and in a real drone.